自动驾驶-决策规划算法十五:人工蚁群算法(C++)
”算法 c 自动驾驶 决策规划 人工蚁群“ 的搜索结果
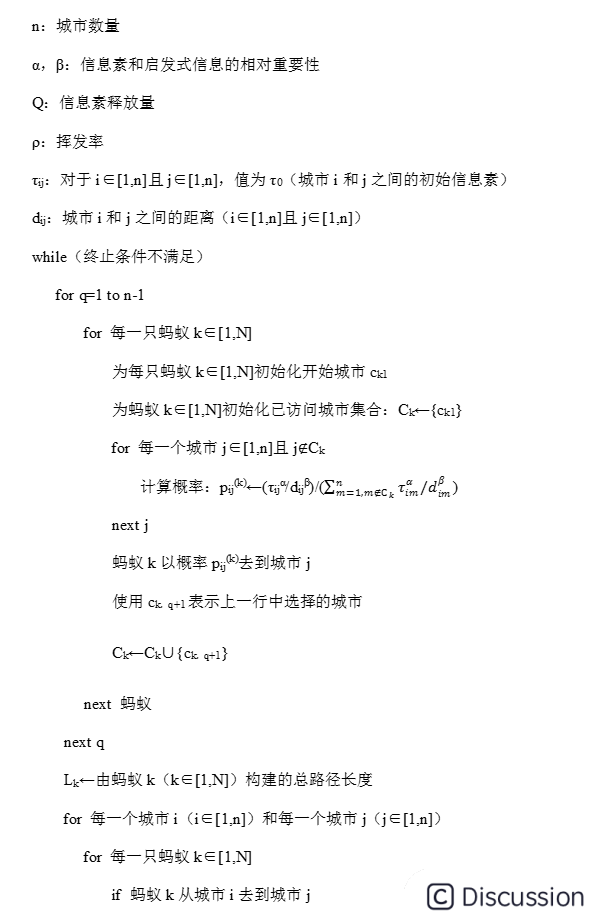
蚁群算法(Ant Colony Algorithm)最初于1992年由意大利学者M.Dorigo等人提出,它是一种模拟自然界中真实蚁群觅食行为的仿生优化算法。研究发现:每只蚂蚁觅食时在走过的路线上会留下一种称为信息素的物质,蚂蚁之间...
图像识别技术,在安防监控、自动驾驶等领域实现对视觉信息的精准分析;自然语言处理技术,应用于搜索引擎、智能客服及社交媒体的情感分析等。 此外,专家系统能够在特定领域提供专业级建议,物联网中的智能设备借助...


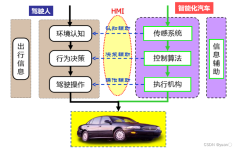
*运动规划(Motion Planning)**以最优性为核心,在环境中给定起点和终点的条件下,规划机器人无冲突行进的状态序列。运动规划框架如下所示,主要包含路径规划与轨迹规划两大组件。那路径规划和轨迹规划有什么区别和...
*运动规划(Motion Planning)**以最优性为核心,在环境中给定起点和终点的条件下,规划机器人无冲突行进的状态序列。运动规划框架如下所示,主要包含路径规划与轨迹规划两大组件。那路径规划和轨迹规划有什么区别和...



自动驾驶学习记录



1 蚁群算法原理 自1991年由意大利学者 M. Dorigo,V. Maniezzo 和 A. Colorni 通过模拟蚁群觅食行为提出了一种基于种群的模拟进化算法——蚁群优化。该算法的出现引起了学者们的极大关注,蚁群算法的特点:...
贝叶斯优化是一种用于黑盒函数优化的方法,旨在在非线性、高度噪声和昂贵的优化问题中找到全局最优解。在贝叶斯优化中,我们将目标函数视为一个黑盒子,无法获取其解析表达式或梯度信息,只能通过函数评估得到函数值...
蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。蚁群算法是...

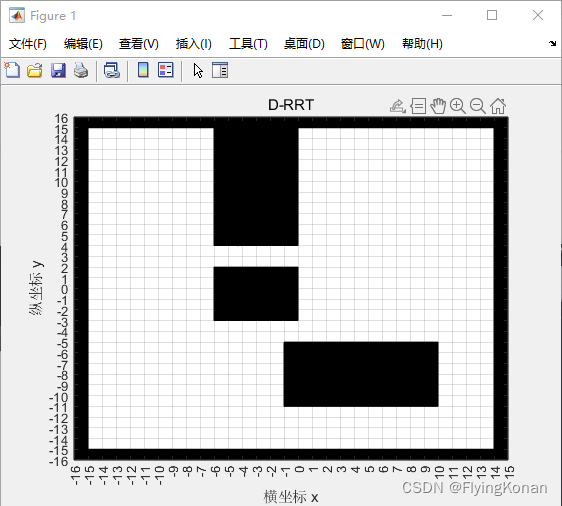
文章目录前言一、传统路径规划算法二、图形学方法三、智能仿生算法四、其他算法总结 前言 移动机器人的自动探索需要对机器人进行路径规划,移动机器人的路径规划问题始于20世纪60年代。路径规划作为机器人导航最...

蚂蚁算法(Ant Colony Optimization Algorithm)是一个经典的遗传算法,其生命周期主要包括两个阶段:搜索阶段和爬行阶段。在搜索阶段,蚂蚁算法会根据当前已知信息和启发函数选择下一步要探索的路径;而在爬行阶段...
转自百度百科和http://www.cnblogs.com/biaoyu/archive/2012/09/26/2704456.html蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型算法...蚁群算法是一种模拟进化算法,...


推荐文章
- 第十三周 ——项目二 “二叉树排序树中查找的路径”-程序员宅基地
- C语言基础 -- scanf函数的返回值及其应用_c语言ignoring return value-程序员宅基地
- 数字医疗时代的数据安全如何保障?_数字医疗服务保障方案-程序员宅基地
- 确定性随机数发生器测试向量——DRBG-HMAC-SHA1_drbg_nopr_hmac_sha1-程序员宅基地
- Apache Lucene 8.0.0 发布,Java 全文搜索引擎-程序员宅基地
- java趣事_【趣事】Java程序员最年轻,C++程序员最年老-程序员宅基地
- 用什么软件测试内存条稳定,使用内存条检测工具监测内存稳定性,内存条检测工具有哪些...-程序员宅基地
- Harmonyos 自定义下拉列表框(select)_harmonyos 下拉列表-程序员宅基地
- VBA入门到进阶常用知识代码总结44_msofalse-程序员宅基地
- 公司个人年终工作总结【10篇】_csdn 公司 年终终结-程序员宅基地